Running system on armv7m4-stm32l4x6-nucleo #
This version is designated for STM32L4x6 processors with Cortex-M4 core. To launch this version the final flash image
should be provided. The image is created as the final artifact of the phoenix-rtos-project building and is located in
the _boot directory. The image consists of a kernel, TTY UART driver, RAM disk filesystem, and psh (shell).
See how to build the Phoenix-RTOS system image.
Development board#
The easiest way to start programming hardware targets using Phoenix-RTOS is to get some of the evaluation boards with a specified target processor or microcontroller.
In this case NUCLEO-L4A6ZG is the example of a
board with stm32l4x6 microcontroller.
Connecting the board#
To provide a power supply for the board and make flashing possible, you have to connect a USB to micro USB cable between
your host pc and the development board (USB PWR port, also called CN1).
To communicate with the board you will need to use a UART-USB converter, like PL2303 TA.
Connect TX, RX, and GND wires to the USART2 (called also USART_B) in the Nucleo board. For example, using PL2303 TA:
PL2303 TX (green) - Nucleo USART_B_RX
PL2303 RX (white) - Nucleo USART_B_TX
PL2303 GND (black) - Nucleo GND
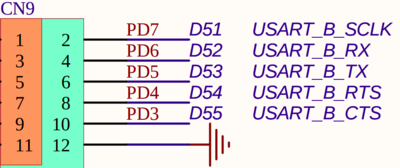
Source: The Nucleo board’s schematic, available on https://www.st.com/en/evaluation-tools/nucleo-l4a6zg.html#cad-resources
Put the converter into your host PC’s USB port
The picture below presents how the board should be connected:

Now you should verify, what USB device on your host-pc is connected with the
UART(console). To check that run:On Ubuntu:
ls -l /dev/serial/by-id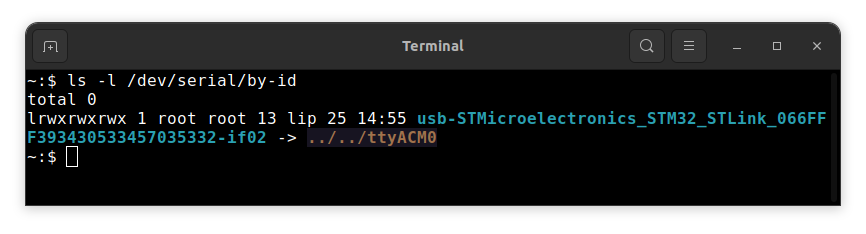
On macOS:
ls -l /dev/tty.*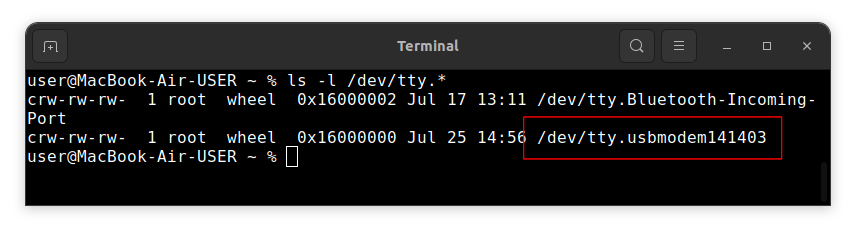
Open serial port in terminal using picocom
picocom -b 115200 --imap lfcrlf /dev/tty[port]How to get picocom and run it without privileges (Ubuntu 22.04)
sudo apt update && \ sudo apt install -y picocom
To use picocom without sudo privileges run this command and then restart:
sudo usermod -a -G tty <yourname>How to get picocom (macOS)
brew update &&\ brew install picocom
You can leave the terminal with the serial port open, and follow the next steps.
Flashing the Phoenix-RTOS system image#
To flash the image to the board you will need openocd in version 0.11 or 0.12. You can check it using
openocd -v
How to get openocd on Ubuntu
To install from the default repositoriy:
use
aptsudo apt install -y openocdcheck if the version is correct
openocd -v
If you encounter errors install manually from sources (v0.12.0):
download, build and install
openocd-0.12.0-1from sourceswget -O- https://launchpad.net/ubuntu/+archive/primary/+sourcefiles/openocd/0.12.0-1build2/openocd_0.12.0.orig.tar.bz2 | \ sudo tar xjvf - -C /usr/local/src && \ cd /usr/local/src/openocd-0.12.0 && \ sudo apt install -y pkg-config \ libusb-1.0-0-dev && \ ./configure --enable-stlink && \ make && \ sudo make install
check if the version is correct
openocd -v
How to get openocd (macOS)
install openocd
brew update &&\ brew install open-ocd
check if the version is correct
openocd -v
If you have openocd, next you can use the following script:
sudo phoenix-rtos-build/scripts/program-stm32l4x6.sh _boot/armv7m4-stm32l4x6-nucleo/phoenix.disk
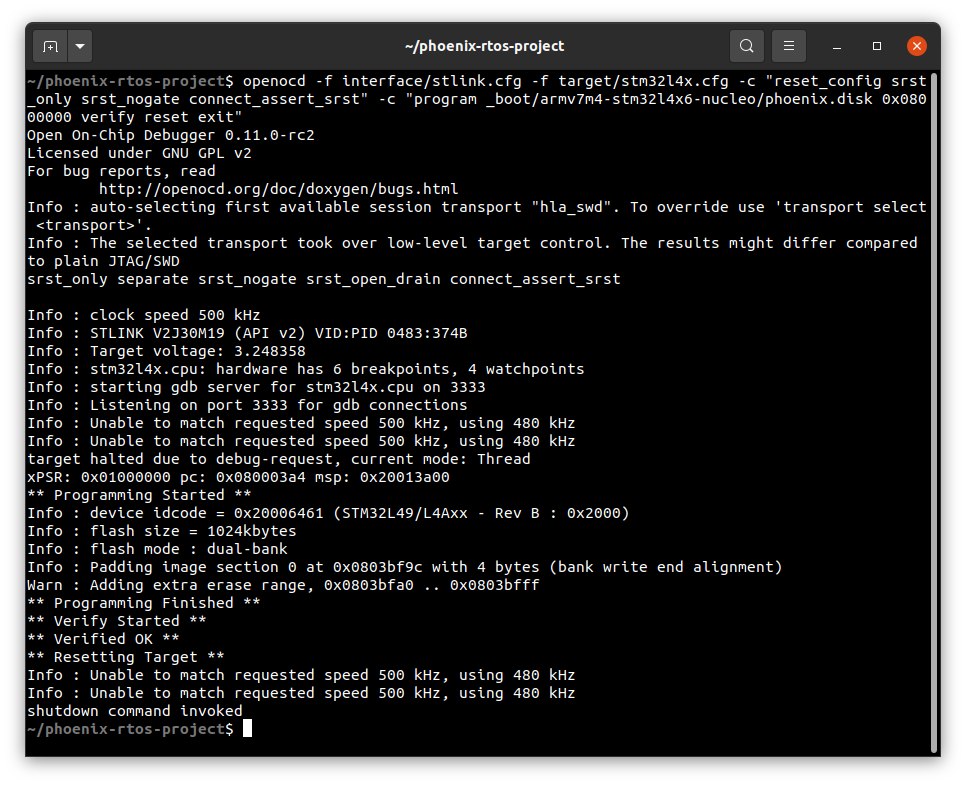
or use openocd directly:
openocd -f interface/stlink.cfg \
-f target/stm32l4x.cfg -c "reset_config srst_only srst_nogate connect_assert_srst" \
-c "program _boot/armv7m4-stm32l4x6-nucleo/phoenix.disk 0x08000000 verify reset exit"
The script can be modified to accommodate other SWD interfaces.
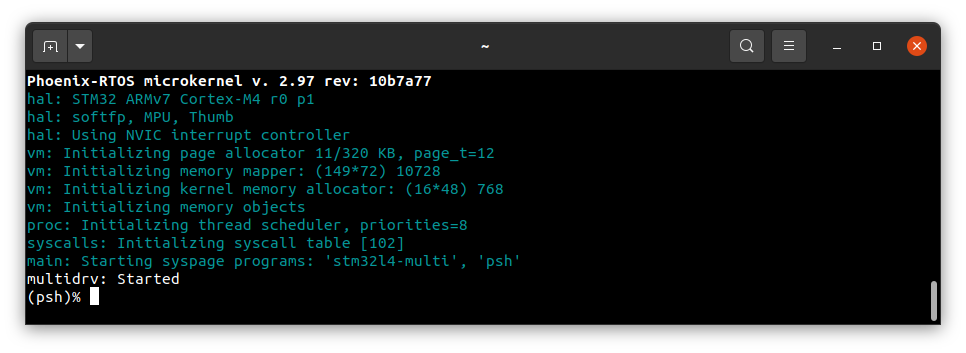
Using Phoenix-RTOS#
Phoenix-RTOS will be launched and the psh shell command prompt will appear in the terminal with the serial port
opened.
Note: You can also enter plo (Phoenix-RTOS loader) by pressing any button, for example,
enterwithin some time after reset (usingRESET B2).
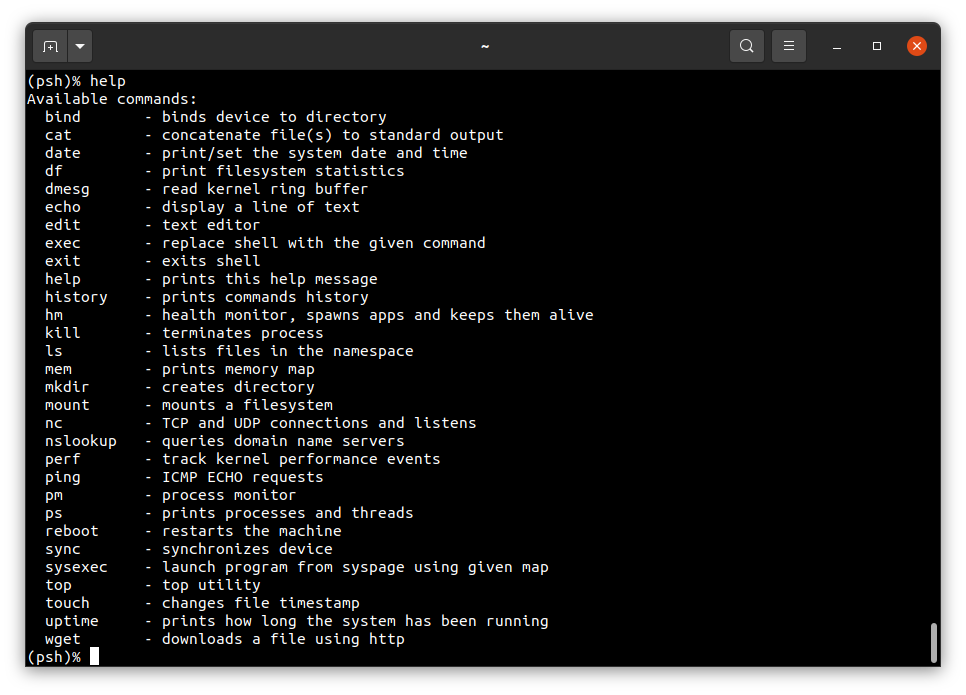
To get the available command list please type:
help
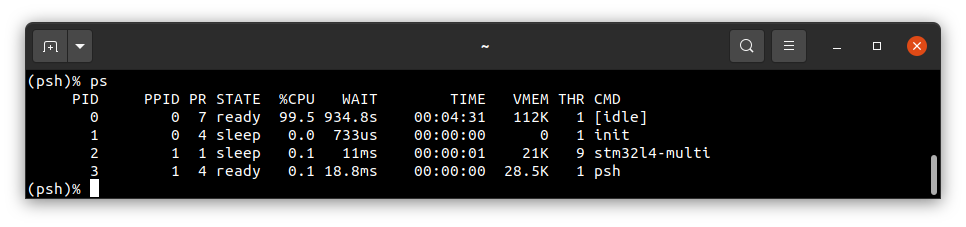
To get the list of working processes please type:
ps